软件说明
一、产品概述:
1、Ansys AVxcelerate 传感器
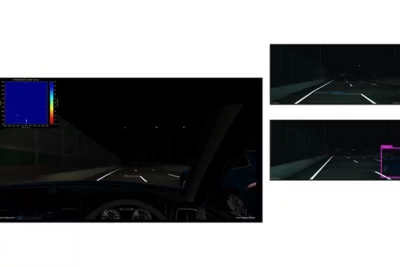
使用您选择的驾驶模拟器的真实驾驶场景
为了在加快设计过程的同时减少对昂贵物理原型的需求,Ansys AVxcelerate 传感器解决方案提供了虚拟体验传感器以测试和分析其性能的机会。在虚拟世界中,使用逼真的驾驶场景来研究 Mil Sil 或 Hil 环境中的雷达、激光雷达和摄像头传感器感知。
逼真的驾驶场景
HiL、MiL 和 SiL 连接
雷达、激光雷达和相机传感器

2、快速规格
发现基于物理的高保真传感器模拟以及自动驾驶汽车的地面实况信息。在真实的驾驶场景中启用多个传感器模拟,以确保物理原型符合预期。
驾驶场景
雷达传感器
硬件在环连接
GPU 雷达
地面实况传感器
多传感器仿真
米勒连接
相机传感器
激光雷达传感器
SiL 连接
二、产品能力:
用于真实传感器测试和验证的高性能仿真解决方案
AVxcelerate Sensors 可轻松集成对地面实况传感器和摄像头、雷达、激光雷达和超声波传感器类型的模拟,而准确的输出使您能够通过将感知、融合和控制功能连接到您的驾驶模拟器中来虚拟评估复杂的 ADAS 系统和自动驾驶汽车选择 IPG Automotive CarMaker 或 Carla。

三、主要特点:
受益于强大的光线追踪功能,重新创建传感器行为并通过专用接口轻松检索传感器输出。
1、驾驶场景
与您选择的驾驶模拟器(如 IPG Automotive CarMaker)的协同仿真功能允许 OEM 和汽车供应商通过使用基于 Ansys 物理的传感器仿真(摄像头、雷达、激光雷达)与 IPG Automotive CarMaker 或 Carla 车辆动态和场景同步。
要在场景中测试传感器,请添加几辆汽车来创建复杂的情况,例如同时跟踪一辆汽车并监控交叉汽车的路径。场景中的每辆车都可以是静态的或自动的,可以在特定的兴趣点或沿预定义的轨迹进行评估。传感器模拟遵循自我车辆动态运动。

2、射线投射理想传感器
超声波、摄像头、雷达、闪光激光雷达和旋转激光雷达传感器的理想模型有助于定义传感器的规格或在早期开发阶段开发 ADAS 功能。
传感器数据输出,如雷击命中点、材料属性等,车辆参数输入或输出,如位置、方位、速度、方向盘等,一应俱全。由于来自多个传感器的数据的一致组合,仿真使您能够验证智能传感器的行为模型或其融合算法。确定性和实时模式均受支持。
3、相机传感器
高保真、实时、基于物理的相机模型被定义为来自相机数据表的一组标准化参数。
软件允许您在极端情况下模拟实际的相机模型。它模拟相机的所有组件,例如镜头系统、成像器和预处理器。对于汽车前置摄像头,也可以在模拟中考虑挡风玻璃。考虑可见光范围内环境的光学和光谱特性,以及透镜系统的光学特性和成像器的光电特性。通过添加插件,模拟可以管理动态适应。相机模拟创建原始图像,用于测试和验证感知算法作为模型在环、软件在环或硬件在环。

4、激光雷达传感器
基于物理的激光雷达模型准确地再现了红外发射器和传感器的行为。所有类型的激光雷达技术都可以在软件中进行参数化。
您将受益于强大的光线追踪功能来重新创建传感器行为,并能够通过专用界面轻松检索传感器结果。IR 发射器世界模型 IR 属性(这是“IR 发射器将模拟 IR 属性吗?”并且在模拟中考虑了接收器电子设备,它可以从原始信号(波形)输出到点云。该解决方案提供了一种收集虚拟传感器的独特方法实时驾驶期间的信息,并使用该信息开发自动驾驶仪代码。
5、雷达传感器
雷达因其高精度和出色的可扩展性而在驾驶员辅助系统中很流行。Ansys VRXPERIENCE Sensors 提供基于现代光线追踪 GPU 技术的独特雷达模型。它适用于汽车应用,以简化雷达系统的虚拟设计、测试和验证。
VRXPERIENCE 的 GPU 雷达功能提供了以大于每秒 30 帧的帧速率实时执行完整的基于物理的雷达场景模拟的能力。模拟考虑了电介质表面的多次反射和传输。可以使用 GPU Radar 的线性可扩展性来模拟多通道和 MIMO 雷达。随着 GPU 雷达的加入,VRXPERIENCE 现在提供了使用所有关键传感器(摄像头、雷达和激光雷达)的全物理模型执行 ADAS 和 Autonomy 场景模拟的能力。从雷达模型中收集到的数据用于有效地激发雷达ECU数字信号处理的算法,以快速提高汽车雷达在边缘情况下的准确性和鲁棒性。Ansys VRXPERIENCE 附带一个定义了介电特性的对象库。
6、HiL、SiL 和 MiL 连接
硬件在环 (HiL):Ansys AVxcelerate 传感器使用原始传感器输出来为在硬件在环测试台上测试的实际智能传感器提供数据。对于相机,该解决方案连接到一个图像注入盒,它用虚拟的成像器代替了实际的成像器。注射盒还管理成像仪和处理芯片 (i2c) 之间的高速连接。
模型和软件在环 (MiL,Sil):通过利用尖端测试(本地和云端)执行大规模的场景变化。通过在无数驾驶场景中改变参数来评估感知性能。